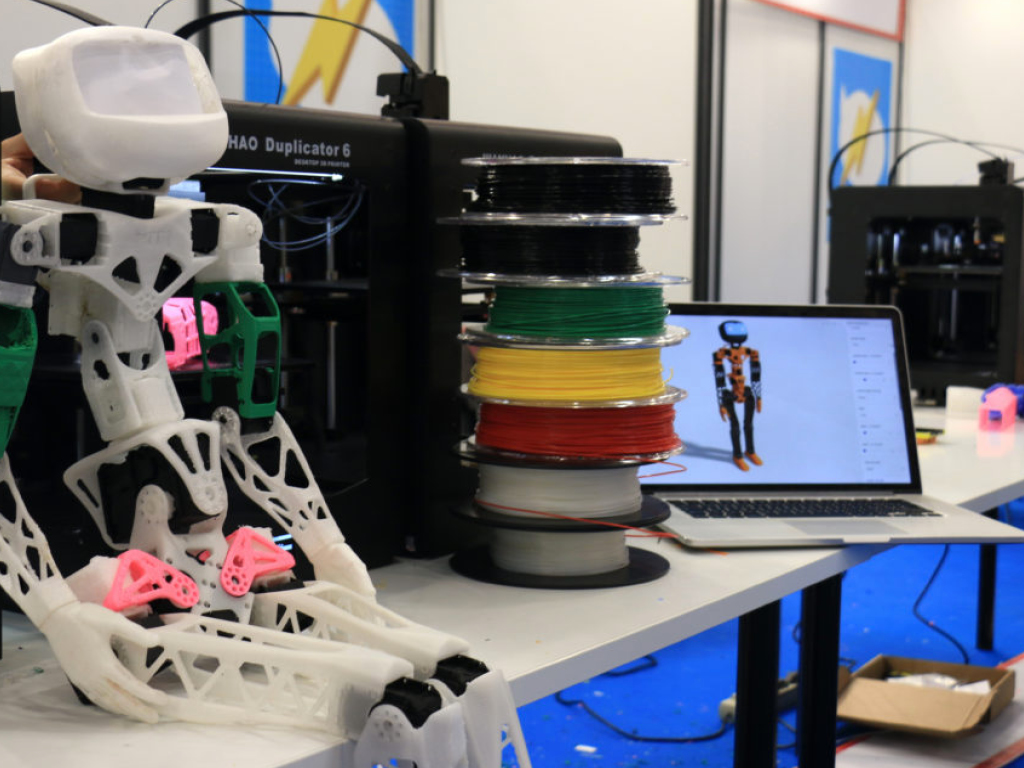
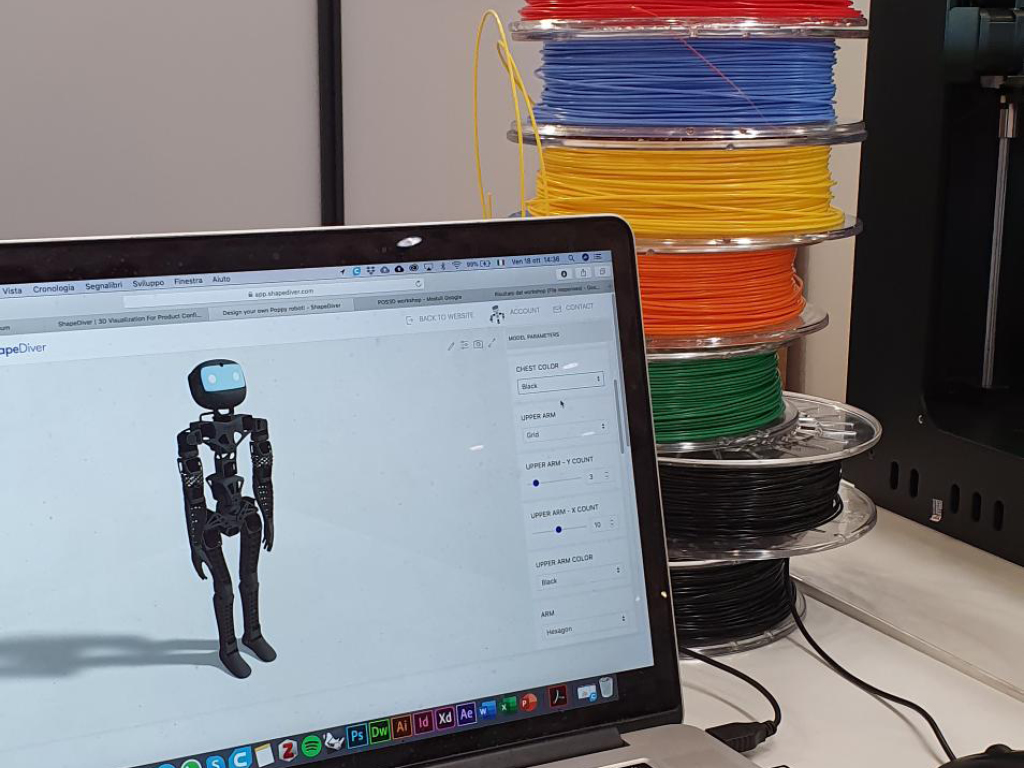
POS3D è stato un workshop interattivo basato sul robot opensource Poppy che si propone di indagare gli aspetti estetico-percettivi della robotica umanoide. Poppy è un robot open source stampabile in 3D e sviluppato da Matthieu Lapeyre, utilizzato da una vasta comunità di ricercatori il cui focus è principalmente sugli aspetti ingegneristici e informatici dello sviluppo della sua piattaforma.
La nostra attività, svoltasi in un più ampio evento divulgativo, la Maker Faire di Roma del 2019, è stata invece finalizzata alla raccolta dei dati per quanto riguarda la percezione degli utenti di un robot compagno, robot caregiver o robot malvagio. Il nostro obiettivo è quello di definire i principi estetici che influenzano l'apprezzamento e l'affetto degli utenti nei confronti di un robot umanoide. Attraverso una definizione parametrica sviluppata con Grasshopper, facilmente modificabile grazie ad un'interfaccia semplice ed intuitiva, è stato utilizzato come strumento per coinvolgere gli utenti in un co-design attività i cui risultati vengono analizzati, presentati in una pubblicazione per Cumulus 2021. I visitatori hanno progettato l’aspetto di Poppy interagendo con un modello parametrico e componendo i vari arti stampati in 3D.